Posts Tagged ‘Raspberry Pi’
 New Pi4B up and running.
New Pi4B up and running.
 |
I got around to purchasing a Pi and settled on the Pi4b I did not want to splurge on the Pi5 as I only use the Pi for HamClock. The package I ordered was the iRasptek Pi4B, 4GB, 64GB micro SD card, 2 monitor cables, cooling heat sinks, case, cooling fan and 3.5 amp power supply with an on/off switch.
I did not need 2 monitor cables, but that is
what
it came with. Also, it came with 2 cooling fans. Not sure why, unless
the
fans have a habit of failing. The SD card was loaded with Noobs, which
easily allowed me to install the Pi OS and did some configuring and update downloads. I then
downloaded HamClock, and I was once again good to go. 
Pi 4B in the case and fan connected

Up and running HamClock
It’s time for some Pi
 |
| HamClock |
A number of years ago I purchased a Raspberry Pi intending to do something with it. Well, it sat for many years with me now and then taking a look at it and thinking someday I will explore the Pi. A few weeks ago for some reason, I Googled Raspberry Pi regarding weather programs.
My thought at the time was to get live local weather reports via the Pi. Also, it had been about 3 years since I had seen my Raspberry Pi and was not sure if I had thrown it out during one of my spur-of-the-moment clean-up binges. I eventually came across it after searching everywhere. "I put it where for sure I would know where it was". That did not work so well BUT I have learned that once I do find something I always place it back in the spot where I first looked for it. I degrees.....
 |
| My Pi |
The box the Pi was in was complete with a power supply, protective case, HDMI cable, micro SD card and a cooling fan. I plugged in the Pi and powered it up with the micro SD card in place, a monitor, mouse and keyboard. Well a red LED light came on but that was it the monitor was blank, and well actually had a floating message "No device connected". I was sure I had downloaded a Pi OS onto the SD card years ago. I did a fast Google search and found out if you have only a red light and no green light (besides the red light) then most likely your SD is either blank, not in properly or defective.
It was off to the Raspberry Pi site to download the latest and greatest OS and in my case that was bullseye. I did check the SD card and it was blank so I was hoping after the OS was installed and put back into the Pi things would come to life...and they did. I also found out that my Pi was a Pi3 (not Pi3B) the latest and greatest is the Pi4 B. The Pi3 will do me just fine and I am finally going to be using it.
As stated I wanted to use it for local weather and I ended up finding something better! Local weather, space weather, UTC clock, contest calendar, VOCAP, a world map that has a host of configurations and more. The software is called HamClock by WB0OEW. This package runs very smoothly on my Pi3 and will auto-update, which I have experienced once already.
 |
| And so it begins |
Now Raspberry Pi is all new to me and I am learning about Sudo, the command line and what to enter into the command line. At this point, in time I have just cut and pasted commands from websites (such as HamClock) to install the program. The installation process for HamClock can be found under the "Desktop" tab on the HamClock site.
I am just starting my Pi learning curve and would appreciate any advice and program suggestions to run.
Evaluating 9 of the Best Single Board Computers for Modern SDR Systems
This past August I had the privilege of attending and video-recording the TAPR Digital Communications Conference in Albuquerque, NM. For several years past, this conference was recorded by Gary Pearce from HamRadioNow, but Gary has since retired from making Ham Radio videos (the series was handed off to David Goldenberg, W0DHG, who is doing a great job with new episodes). In lieu of this fact, I spoke with Gary and with Steven Bible, the administrator of the DCC, and was permitted to take up the mantle of recording all of the forums and putting them on YouTube.
With this first forum, Scotty Cowling, WA2DFI, presents his findings for 9 of the best Single Board computers for modern SDR systems. Among these boards are, of course, the Raspberry Pi, but several others are also discussed. I thought this information was valuable and useful to those of us who want to do Amateur Radio projects. This applies not only to SDR Receivers and Transceivers, but also for dozens of other projects in our hobby.
As Scotty states in the video, lots of time and research was put into this presentation because the information he gathered isn’t readily available in one place. He spent quite a bit of time digging for the information about SBCs to present in this forum.
I hope that you enjoy watching this forum as much as I did.
[embedyt] https://www.youtube.com/watch?v=4mMtzyydLPA[/embedyt]
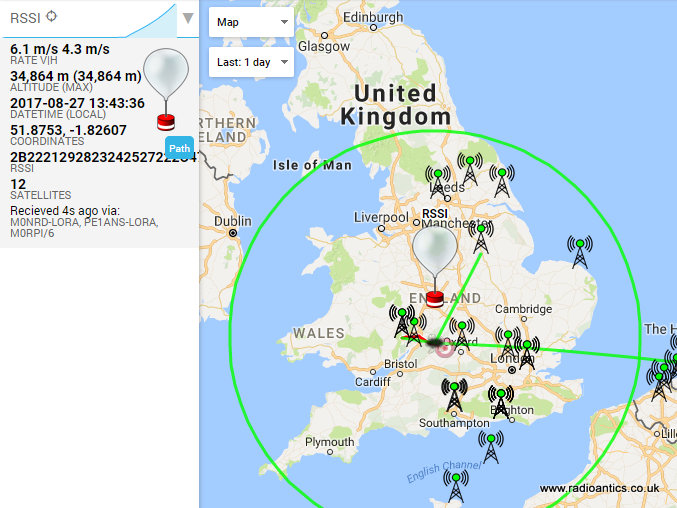
868MHz LoRa HAB Tracking Success
868MHz ISM devices are available but are not as widely used. Back in December I posted about trying to track a flight by HAB Enthusiast Dave Akerman who is experimenting using LoRa devices on this band. I had limited success receiving that flight and another ones so when I saw that Dave was planning another flight today using 868MHz LoRa I had a rethink on how to approach tracking it.
The antenna I used was a collinear one built from cheap satellite coax, similar to that I built for ADB-S however rather than having a long coax run to the LoRa gateway I opted to put the Raspberry Pi up on the pole at the base of the antenna to limit any loss.
The antenna can be seen connected to the Raspberry Pi and LoRa add on board, the Pi has a WiFi dongle.

The antenna was inserted into a piece of conduit to keep it upright and it and the Pi were strapped to a 5m painters pole (using a plastic lid as an insulator)

A USB power pack was also strapped to the pole to keep the Pi powered, hopefully you can see it in the photo below.

The pole was put up and was about the same height as my normal dual band collinear

Well it all worked extremely well, and got a lot of decodes as can be seen by the pie-chart generated by the habitat.habhub.org system, the third best receiver only bettered by Dave himself (M0RPI) and a station nearer to the flight path.

The Pi was connected to my network via WiFi and controlled by a Putty console on my shack PC
It was a useful experiment and I am thinking of installing a dedicated mast mounted LoRa receiver with 868 and 434MHz antennas (and possibly pre-amps and filters) following this result.
LHS Episode #183: All the Acronyms
 Hello, listeners! In this episode the Linux in the Ham Shack crew talks about topics including new 60-meter allocations, updates to codec2, the Batbeam antenna, quantum computing, an amateur radio-related cape for Raspberry Pi, morse code decoders, Hamvention and much more. Thank you for downloading this episode and giving it a listen. Don't forget to send us feedback. We're on all the social media networks and we even have a call-in feedback line at +1-909-547-7469.
Hello, listeners! In this episode the Linux in the Ham Shack crew talks about topics including new 60-meter allocations, updates to codec2, the Batbeam antenna, quantum computing, an amateur radio-related cape for Raspberry Pi, morse code decoders, Hamvention and much more. Thank you for downloading this episode and giving it a listen. Don't forget to send us feedback. We're on all the social media networks and we even have a call-in feedback line at +1-909-547-7469.
73 de The LHS Crew
LoRa LoRa Laughs!
Until recently the preferred method was to use RTTY transmissions, however the advent of the IoT (Internet Of Things) has seen manufacturers of radio modules develop devices to increase both the range and reliability of communication between 'connected' embedded devices.
One such development are LoRa devices, primarily for devices to connect to a global wide-area network LoRaWAN, more information can be found at the LoRa Alliance in addition there are some open hobbyist networks such as The Things Network using these devices.
Using chirp spread-spectrum modulation these LoRa devices are marketed as being capable of robust, interference and fade resistant communication over longer distances and higher data rates.
The UK HAB community has begun experimenting with these devices and one of their keen proponents is Dave Akerman (M0RPI). Dave has developed both payload software for the "Pi In The Sky" PITS tracker along with Anthony Stirk (M0UPU) and gateway software in collaboration with Robert Harrison M0RJX. The 'gateway' is the necessary receiver element to upload the data to the tracking system. (all software is on the PITS Github page)
Dave gave an informative presentation on LoRa at the UKHAS 2016 Conference which is now available online (starts around 3 minutes in)
I had intended to fly a LoRa transmitter on my 2015 Hamfest balloon but it stopped working at the eleventh hour and hadn't done anything else with LoRa till recently.
Spurred on by the conference presentation and the fact more and more flights are carrying LoRa I invested in one of the Raspberry Pi expansion boards sold by Uputronics and built up another prototype tracker with a working LoRa module.
I have done talks at various radio clubs and societies and demonstrated it working but hadn't actually received a 'real flight' as opportunities have been scarce due to the weather. However in the few weeks I have tracked a couple of flights receiving both telemetry and image data, getting a couple of complete images from the imaginatively named 'SPACE' flight.

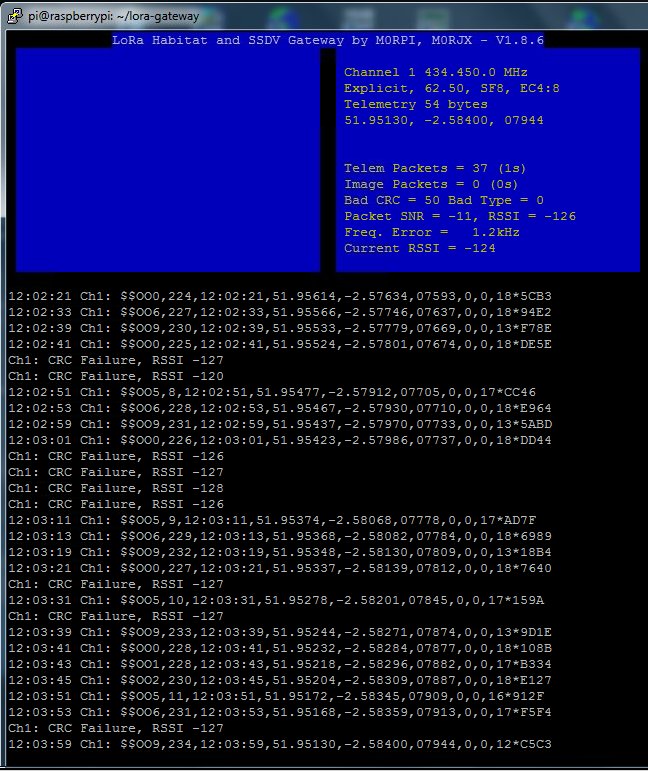
Dave Akerman also flew a flight experimenting with multiple payloads using Time-division multiplexing (TDM). It had 10 small of "AVRLoRaNut" trackers (of Anthony M0UPU's design) all set to the same frequency (434.450MHz) and same transmission mode. The trackers took turns to transmit, with each one allocated a particular transmission slot in a 20-second cycle. The cycle was GPS-timed but, if any tracker lost GPS lock then it derived timing from the transmissions from the other trackers (the LoRa devices are also receivers) All 10 trackers were suspended from the same balloon. This was in preparation for the 'Operation Outward' re-enactment next year (Steve Randall gave a presentation on it in the above conference video starts 1 hour 16 mins in)
I successfully received telemetry despite the flight not being local and constantly heading away from me as can be seen in the screen shots.
Always a busy man Dave also flew a flight with an experimental camera setup. The SSDV images this time came from a Nikon compact camera, connected to the Raspberry Pi via USB, and using gphoto2 software to take and transfer images to the Pi where they were stored, resized and converted to SSDV format for transmission. These were large images with a high quality SSDV setting so lots of packets per image, approx 1400 per image in testing.
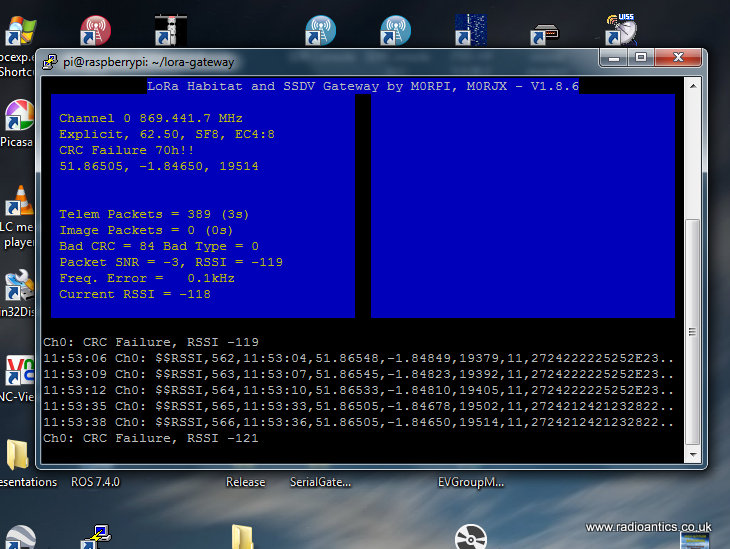
This flight was using a 868MHz LoRa device, rather than the usual 434MHz due to the IR2030 restriction on bandwidth and duty cycle. Dave was using his Turbo-X or Mode 4 setting which is as fast as LoRa will go within IR2030 bandwidth restrictions (approx 8 packets / 2k bytes per second)
I hastily ordered a 868MHz device and soldered it in the spare slot on my gateway and built a collinear for 868MHz similar to the one I built for ADB-S reception (see video here).

You can see it lashed up just below the dual-band collinear - not ideal mounting and it wasn't tested in anyway, built blind! The less than optimal setup at UHF, the insane data rate and the distance (>100miles) were going to make reception difficult, so I was pleased I did manage to receive telemetry and image packets.

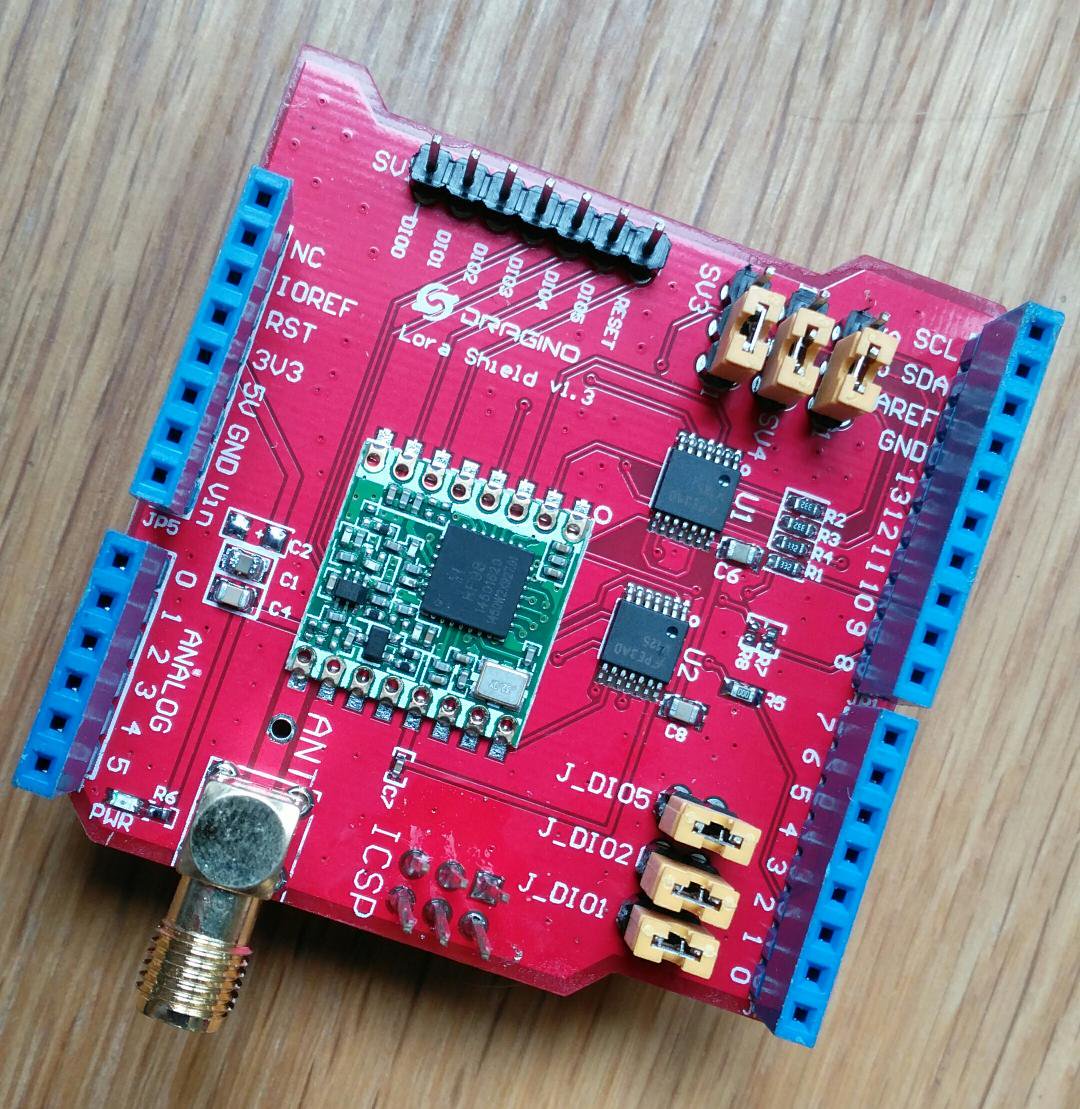
Most of the current LoRa development in the HAB community has tended to be on the Raspberry Pi due to the use with SSDV and the easy availability of cameras and ready built kit. LoRa is of course available on the Arduino platform and I had purchased a couple of 'Dragino' shields (pictured below) with a LoRa device on.
Dave has done some work on a AVR tracker software and a simple Arduino 'Serial' LoRa receiver. The receiver connects to a host PC appearing as a serial port and by running some gateway software the receiver can be configured via the serial link and received data is sent back to the gateway to be uploaded to the Habitat tracking system and SSDV system - the software can be seen here during the 'Operation Outward' test flight.

This gateway software is written in Pascal using Delphi and is not as functional as the Raspberry Pi Gateway software. Dave has made the source code available but I am not au fait at all with Delphi however I installed the free development IDE and intended to get in and make modifications but it seems to require a non-free(?) library for the serial comms so ditched the idea.
Instead I have spent the last few days developing a C# .NET version using Microsoft Visual Studio (the community version is free) and also have been modifying the Arduino code in the receiver to add functionality, such as storing the SSDV images locally.
It is still a work in progress but I have made a video showing the current state
Anyway as Cilla Black would say it's been a Lorra Lorra Laughs!

LoRa LoRa Laughs!
Until recently the preferred method was to use RTTY transmissions, however the advent of the IoT (Internet Of Things) has seen manufacturers of radio modules develop devices to increase both the range and reliability of communication between 'connected' embedded devices.
One such development are LoRa devices, primarily for devices to connect to a global wide-area network LoRaWAN, more information can be found at the LoRa Alliance in addition there are some open hobbyist networks such as The Things Network using these devices.
Using chirp spread-spectrum modulation these LoRa devices are marketed as being capable of robust, interference and fade resistant communication over longer distances and higher data rates.
The UK HAB community has begun experimenting with these devices and one of their keen proponents is Dave Akerman (M0RPI). Dave has developed both payload software for the "Pi In The Sky" PITS tracker along with Anthony Stirk (M0UPU) and gateway software in collaboration with Robert Harrison M0RJX. The 'gateway' is the necessary receiver element to upload the data to the tracking system. (all software is on the PITS Github page)
Dave gave an informative presentation on LoRa at the UKHAS 2016 Conference which is now available online (starts around 3 minutes in)
I had intended to fly a LoRa transmitter on my 2015 Hamfest balloon but it stopped working at the eleventh hour and hadn't done anything else with LoRa till recently.
Spurred on by the conference presentation and the fact more and more flights are carrying LoRa I invested in one of the Raspberry Pi expansion boards sold by Uputronics and built up another prototype tracker with a working LoRa module.
I have done talks at various radio clubs and societies and demonstrated it working but hadn't actually received a 'real flight' as opportunities have been scarce due to the weather. However in the few weeks I have tracked a couple of flights receiving both telemetry and image data, getting a couple of complete images from the imaginatively named 'SPACE' flight.
Dave Akerman also flew a flight experimenting with multiple payloads using Time-division multiplexing (TDM). It had 10 small of "AVRLoRaNut" trackers (of Anthony M0UPU's design) all set to the same frequency (434.450MHz) and same transmission mode. The trackers took turns to transmit, with each one allocated a particular transmission slot in a 20-second cycle. The cycle was GPS-timed but, if any tracker lost GPS lock then it derived timing from the transmissions from the other trackers (the LoRa devices are also receivers) All 10 trackers were suspended from the same balloon. This was in preparation for the 'Operation Outward' re-enactment next year (Steve Randall gave a presentation on it in the above conference video starts 1 hour 16 mins in)
I successfully received telemetry despite the flight not being local and constantly heading away from me as can be seen in the screen shots.
Always a busy man Dave also flew a flight with an experimental camera setup. The SSDV images this time came from a Nikon compact camera, connected to the Raspberry Pi via USB, and using gphoto2 software to take and transfer images to the Pi where they were stored, resized and converted to SSDV format for transmission. These were large images with a high quality SSDV setting so lots of packets per image, approx 1400 per image in testing.
This flight was using a 868MHz LoRa device, rather than the usual 434MHz due to the IR2030 restriction on bandwidth and duty cycle. Dave was using his Turbo-X or Mode 4 setting which is as fast as LoRa will go within IR2030 bandwidth restrictions (approx 8 packets / 2k bytes per second)
I hastily ordered a 868MHz device and soldered it in the spare slot on my gateway and built a collinear for 868MHz similar to the one I built for ADB-S reception (see video here).
You can see it lashed up just below the dual-band collinear - not ideal mounting and it wasn't tested in anyway, built blind! The less than optimal setup at UHF, the insane data rate and the distance (>100miles) were going to make reception difficult, so I was pleased I did manage to receive telemetry and image packets.
Most of the current LoRa development in the HAB community has tended to be on the Raspberry Pi due to the use with SSDV and the easy availability of cameras and ready built kit. LoRa is of course available on the Arduino platform and I had purchased a couple of 'Dragino' shields (pictured below) with a LoRa device on.
Dave has done some work on a AVR tracker software and a simple Arduino 'Serial' LoRa receiver. The receiver connects to a host PC appearing as a serial port and by running some gateway software the receiver can be configured via the serial link and received data is sent back to the gateway to be uploaded to the Habitat tracking system and SSDV system - the software can be seen here during the 'Operation Outward' test flight.
This gateway software is written in Pascal using Delphi and is not as functional as the Raspberry Pi Gateway software. Dave has made the source code available but I am not au fait at all with Delphi however I installed the free development IDE and intended to get in and make modifications but it seems to require a non-free(?) library for the serial comms so ditched the idea.
Instead I have spent the last few days developing a C# .NET version using Microsoft Visual Studio (the community version is free) and also have been modifying the Arduino code in the receiver to add functionality, such as storing the SSDV images locally.
It is still a work in progress but I have made a video showing the current state
Anyway as Cilla Black would say it's been a Lorra Lorra Laughs!