Posts Tagged ‘ukhas’
 868MHz LoRa HAB Tracking Success
868MHz LoRa HAB Tracking Success
Most HAB (High Altitude Balloon) tracking in the UK involves the use of 434MHz ISM devices due to the ready availability of suitable antenna and receiver equipment due to it sharing the 70cm amateur radio bands.
868MHz ISM devices are available but are not as widely used. Back in December I posted about trying to track a flight by HAB Enthusiast Dave Akerman who is experimenting using LoRa devices on this band. I had limited success receiving that flight and another ones so when I saw that Dave was planning another flight today using 868MHz LoRa I had a rethink on how to approach tracking it.
The antenna I used was a collinear one built from cheap satellite coax, similar to that I built for ADB-S however rather than having a long coax run to the LoRa gateway I opted to put the Raspberry Pi up on the pole at the base of the antenna to limit any loss.
The antenna can be seen connected to the Raspberry Pi and LoRa add on board, the Pi has a WiFi dongle.

The antenna was inserted into a piece of conduit to keep it upright and it and the Pi were strapped to a 5m painters pole (using a plastic lid as an insulator)

A USB power pack was also strapped to the pole to keep the Pi powered, hopefully you can see it in the photo below.

The pole was put up and was about the same height as my normal dual band collinear

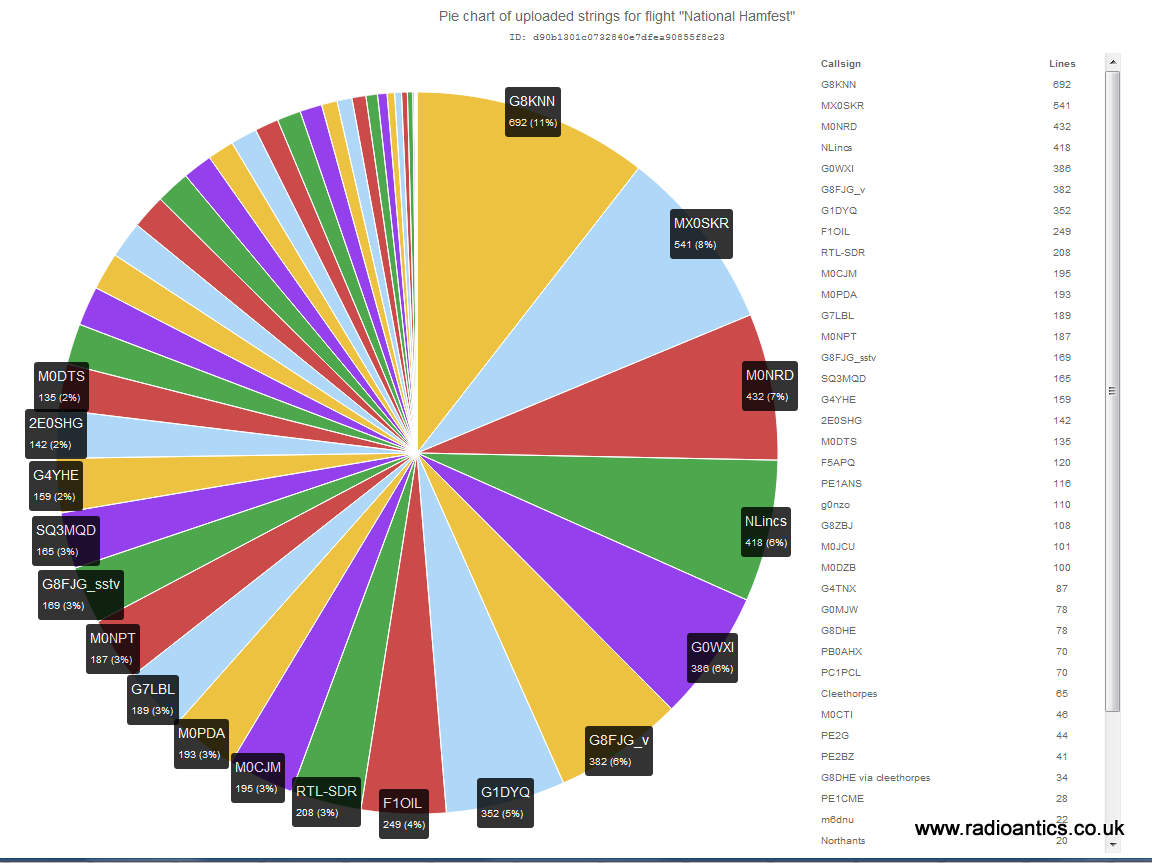
Well it all worked extremely well, and got a lot of decodes as can be seen by the pie-chart generated by the habitat.habhub.org system, the third best receiver only bettered by Dave himself (M0RPI) and a station nearer to the flight path.
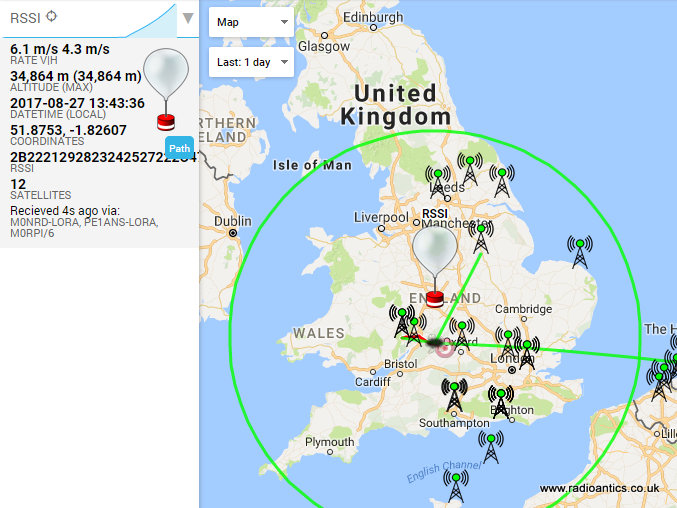
 You can see my geographical position relative to the flight below (I am the station NNE with the green line, about 160km away) and received a lot of telemetry strings even when the height of the balloon meant I was outside the 5 degree above the horizon circle (shown in green).
You can see my geographical position relative to the flight below (I am the station NNE with the green line, about 160km away) and received a lot of telemetry strings even when the height of the balloon meant I was outside the 5 degree above the horizon circle (shown in green).

The Pi was connected to my network via WiFi and controlled by a Putty console on my shack PC
It was a useful experiment and I am thinking of installing a dedicated mast mounted LoRa receiver with 868 and 434MHz antennas (and possibly pre-amps and filters) following this result.
868MHz ISM devices are available but are not as widely used. Back in December I posted about trying to track a flight by HAB Enthusiast Dave Akerman who is experimenting using LoRa devices on this band. I had limited success receiving that flight and another ones so when I saw that Dave was planning another flight today using 868MHz LoRa I had a rethink on how to approach tracking it.
The antenna I used was a collinear one built from cheap satellite coax, similar to that I built for ADB-S however rather than having a long coax run to the LoRa gateway I opted to put the Raspberry Pi up on the pole at the base of the antenna to limit any loss.
The antenna can be seen connected to the Raspberry Pi and LoRa add on board, the Pi has a WiFi dongle.

The antenna was inserted into a piece of conduit to keep it upright and it and the Pi were strapped to a 5m painters pole (using a plastic lid as an insulator)

A USB power pack was also strapped to the pole to keep the Pi powered, hopefully you can see it in the photo below.

The pole was put up and was about the same height as my normal dual band collinear

Well it all worked extremely well, and got a lot of decodes as can be seen by the pie-chart generated by the habitat.habhub.org system, the third best receiver only bettered by Dave himself (M0RPI) and a station nearer to the flight path.

The Pi was connected to my network via WiFi and controlled by a Putty console on my shack PC
It was a useful experiment and I am thinking of installing a dedicated mast mounted LoRa receiver with 868 and 434MHz antennas (and possibly pre-amps and filters) following this result.
LoRa LoRa Laughs!
Due to the restrictions on airborne amateur radio operation in the UK High Altitude Balloon (HAB) enthusiasts have been forced to utilise licence exempt low power devices in novel ways to make radio trackers for their payloads. I have written plenty on this blog about my HAB tracking, the UKHAS distributed listener network and my own flights.
Until recently the preferred method was to use RTTY transmissions, however the advent of the IoT (Internet Of Things) has seen manufacturers of radio modules develop devices to increase both the range and reliability of communication between 'connected' embedded devices.
One such development are LoRa devices, primarily for devices to connect to a global wide-area network LoRaWAN, more information can be found at the LoRa Alliance in addition there are some open hobbyist networks such as The Things Network using these devices.
Using chirp spread-spectrum modulation these LoRa devices are marketed as being capable of robust, interference and fade resistant communication over longer distances and higher data rates.
The UK HAB community has begun experimenting with these devices and one of their keen proponents is Dave Akerman (M0RPI). Dave has developed both payload software for the "Pi In The Sky" PITS tracker along with Anthony Stirk (M0UPU) and gateway software in collaboration with Robert Harrison M0RJX. The 'gateway' is the necessary receiver element to upload the data to the tracking system. (all software is on the PITS Github page)
Dave gave an informative presentation on LoRa at the UKHAS 2016 Conference which is now available online (starts around 3 minutes in)
I had intended to fly a LoRa transmitter on my 2015 Hamfest balloon but it stopped working at the eleventh hour and hadn't done anything else with LoRa till recently.
Spurred on by the conference presentation and the fact more and more flights are carrying LoRa I invested in one of the Raspberry Pi expansion boards sold by Uputronics and built up another prototype tracker with a working LoRa module.
I have done talks at various radio clubs and societies and demonstrated it working but hadn't actually received a 'real flight' as opportunities have been scarce due to the weather. However in the few weeks I have tracked a couple of flights receiving both telemetry and image data, getting a couple of complete images from the imaginatively named 'SPACE' flight.

Dave Akerman also flew a flight experimenting with multiple payloads using Time-division multiplexing (TDM). It had 10 small of "AVRLoRaNut" trackers (of Anthony M0UPU's design) all set to the same frequency (434.450MHz) and same transmission mode. The trackers took turns to transmit, with each one allocated a particular transmission slot in a 20-second cycle. The cycle was GPS-timed but, if any tracker lost GPS lock then it derived timing from the transmissions from the other trackers (the LoRa devices are also receivers) All 10 trackers were suspended from the same balloon. This was in preparation for the 'Operation Outward' re-enactment next year (Steve Randall gave a presentation on it in the above conference video starts 1 hour 16 mins in)
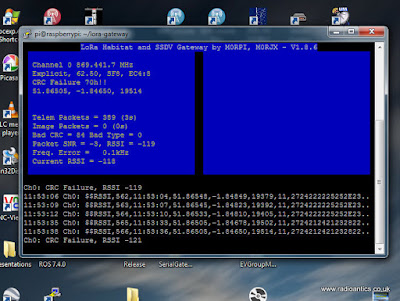
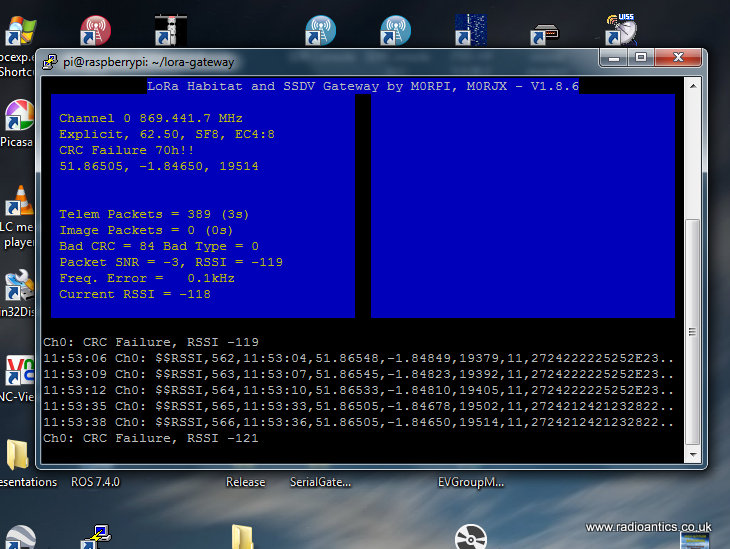
I successfully received telemetry despite the flight not being local and constantly heading away from me as can be seen in the screen shots.
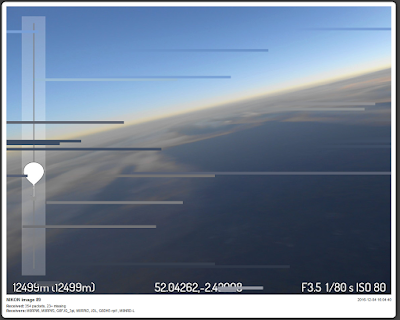
Always a busy man Dave also flew a flight with an experimental camera setup. The SSDV images this time came from a Nikon compact camera, connected to the Raspberry Pi via USB, and using gphoto2 software to take and transfer images to the Pi where they were stored, resized and converted to SSDV format for transmission. These were large images with a high quality SSDV setting so lots of packets per image, approx 1400 per image in testing.
This flight was using a 868MHz LoRa device, rather than the usual 434MHz due to the IR2030 restriction on bandwidth and duty cycle. Dave was using his Turbo-X or Mode 4 setting which is as fast as LoRa will go within IR2030 bandwidth restrictions (approx 8 packets / 2k bytes per second)
I hastily ordered a 868MHz device and soldered it in the spare slot on my gateway and built a collinear for 868MHz similar to the one I built for ADB-S reception (see video here).

You can see it lashed up just below the dual-band collinear - not ideal mounting and it wasn't tested in anyway, built blind! The less than optimal setup at UHF, the insane data rate and the distance (>100miles) were going to make reception difficult, so I was pleased I did manage to receive telemetry and image packets.
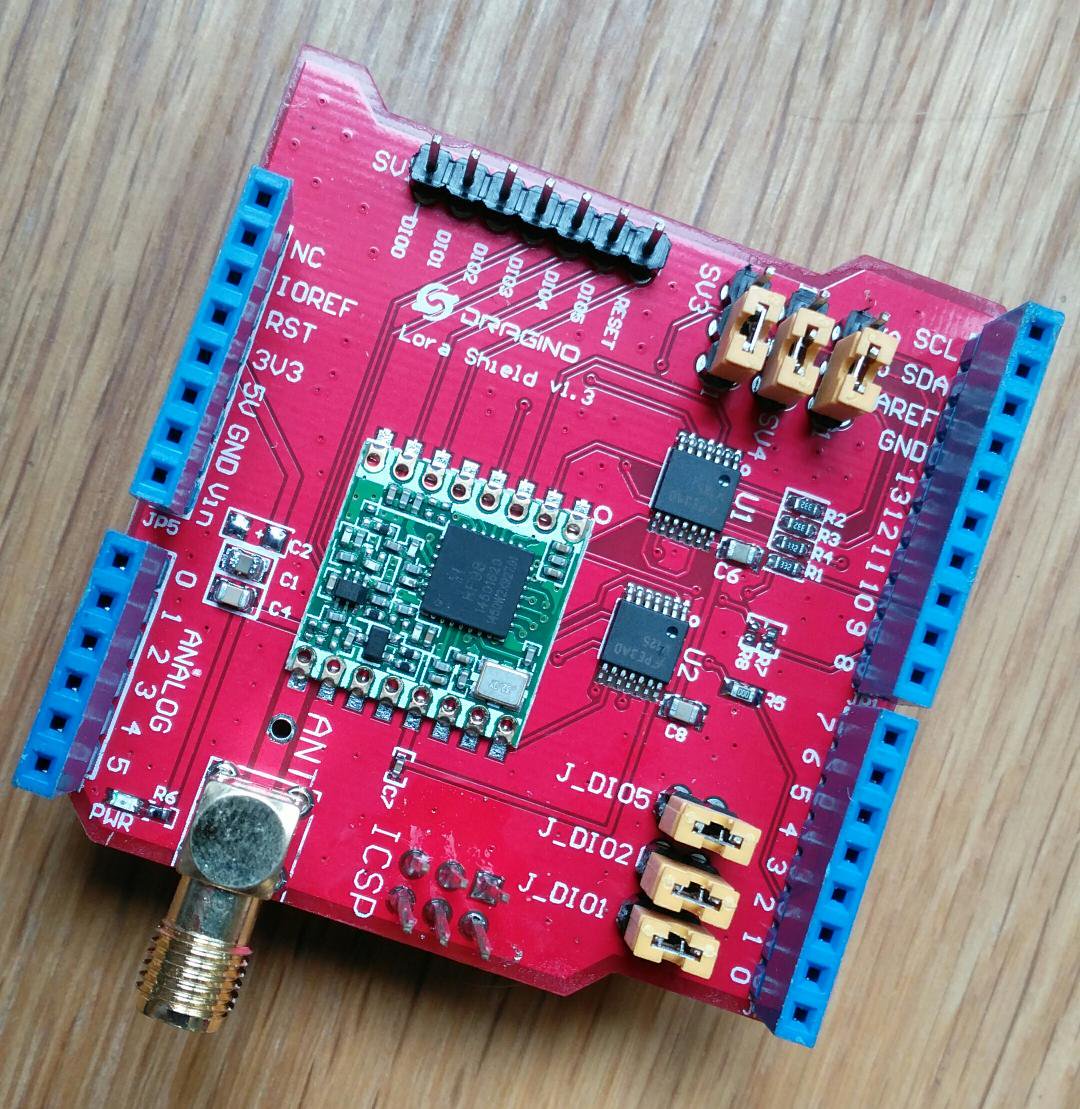
Most of the current LoRa development in the HAB community has tended to be on the Raspberry Pi due to the use with SSDV and the easy availability of cameras and ready built kit. LoRa is of course available on the Arduino platform and I had purchased a couple of 'Dragino' shields (pictured below) with a LoRa device on.

Dave has done some work on a AVR tracker software and a simple Arduino 'Serial' LoRa receiver. The receiver connects to a host PC appearing as a serial port and by running some gateway software the receiver can be configured via the serial link and received data is sent back to the gateway to be uploaded to the Habitat tracking system and SSDV system - the software can be seen here during the 'Operation Outward' test flight.

This gateway software is written in Pascal using Delphi and is not as functional as the Raspberry Pi Gateway software. Dave has made the source code available but I am not au fait at all with Delphi however I installed the free development IDE and intended to get in and make modifications but it seems to require a non-free(?) library for the serial comms so ditched the idea.
Instead I have spent the last few days developing a C# .NET version using Microsoft Visual Studio (the community version is free) and also have been modifying the Arduino code in the receiver to add functionality, such as storing the SSDV images locally.
It is still a work in progress but I have made a video showing the current state
Anyway as Cilla Black would say it's been a Lorra Lorra Laughs!

Until recently the preferred method was to use RTTY transmissions, however the advent of the IoT (Internet Of Things) has seen manufacturers of radio modules develop devices to increase both the range and reliability of communication between 'connected' embedded devices.
One such development are LoRa devices, primarily for devices to connect to a global wide-area network LoRaWAN, more information can be found at the LoRa Alliance in addition there are some open hobbyist networks such as The Things Network using these devices.
Using chirp spread-spectrum modulation these LoRa devices are marketed as being capable of robust, interference and fade resistant communication over longer distances and higher data rates.
The UK HAB community has begun experimenting with these devices and one of their keen proponents is Dave Akerman (M0RPI). Dave has developed both payload software for the "Pi In The Sky" PITS tracker along with Anthony Stirk (M0UPU) and gateway software in collaboration with Robert Harrison M0RJX. The 'gateway' is the necessary receiver element to upload the data to the tracking system. (all software is on the PITS Github page)
Dave gave an informative presentation on LoRa at the UKHAS 2016 Conference which is now available online (starts around 3 minutes in)
I had intended to fly a LoRa transmitter on my 2015 Hamfest balloon but it stopped working at the eleventh hour and hadn't done anything else with LoRa till recently.
Spurred on by the conference presentation and the fact more and more flights are carrying LoRa I invested in one of the Raspberry Pi expansion boards sold by Uputronics and built up another prototype tracker with a working LoRa module.
I have done talks at various radio clubs and societies and demonstrated it working but hadn't actually received a 'real flight' as opportunities have been scarce due to the weather. However in the few weeks I have tracked a couple of flights receiving both telemetry and image data, getting a couple of complete images from the imaginatively named 'SPACE' flight.

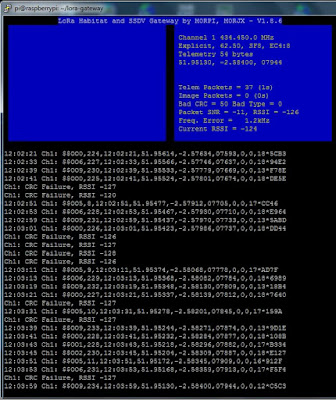
Dave Akerman also flew a flight experimenting with multiple payloads using Time-division multiplexing (TDM). It had 10 small of "AVRLoRaNut" trackers (of Anthony M0UPU's design) all set to the same frequency (434.450MHz) and same transmission mode. The trackers took turns to transmit, with each one allocated a particular transmission slot in a 20-second cycle. The cycle was GPS-timed but, if any tracker lost GPS lock then it derived timing from the transmissions from the other trackers (the LoRa devices are also receivers) All 10 trackers were suspended from the same balloon. This was in preparation for the 'Operation Outward' re-enactment next year (Steve Randall gave a presentation on it in the above conference video starts 1 hour 16 mins in)
I successfully received telemetry despite the flight not being local and constantly heading away from me as can be seen in the screen shots.
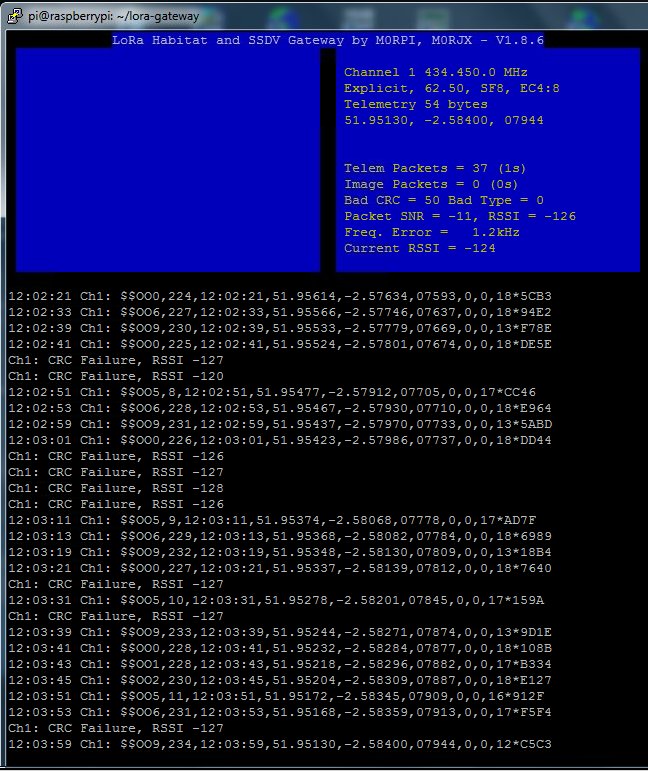
Always a busy man Dave also flew a flight with an experimental camera setup. The SSDV images this time came from a Nikon compact camera, connected to the Raspberry Pi via USB, and using gphoto2 software to take and transfer images to the Pi where they were stored, resized and converted to SSDV format for transmission. These were large images with a high quality SSDV setting so lots of packets per image, approx 1400 per image in testing.
This flight was using a 868MHz LoRa device, rather than the usual 434MHz due to the IR2030 restriction on bandwidth and duty cycle. Dave was using his Turbo-X or Mode 4 setting which is as fast as LoRa will go within IR2030 bandwidth restrictions (approx 8 packets / 2k bytes per second)
I hastily ordered a 868MHz device and soldered it in the spare slot on my gateway and built a collinear for 868MHz similar to the one I built for ADB-S reception (see video here).

You can see it lashed up just below the dual-band collinear - not ideal mounting and it wasn't tested in anyway, built blind! The less than optimal setup at UHF, the insane data rate and the distance (>100miles) were going to make reception difficult, so I was pleased I did manage to receive telemetry and image packets.

Most of the current LoRa development in the HAB community has tended to be on the Raspberry Pi due to the use with SSDV and the easy availability of cameras and ready built kit. LoRa is of course available on the Arduino platform and I had purchased a couple of 'Dragino' shields (pictured below) with a LoRa device on.
Dave has done some work on a AVR tracker software and a simple Arduino 'Serial' LoRa receiver. The receiver connects to a host PC appearing as a serial port and by running some gateway software the receiver can be configured via the serial link and received data is sent back to the gateway to be uploaded to the Habitat tracking system and SSDV system - the software can be seen here during the 'Operation Outward' test flight.

This gateway software is written in Pascal using Delphi and is not as functional as the Raspberry Pi Gateway software. Dave has made the source code available but I am not au fait at all with Delphi however I installed the free development IDE and intended to get in and make modifications but it seems to require a non-free(?) library for the serial comms so ditched the idea.
Instead I have spent the last few days developing a C# .NET version using Microsoft Visual Studio (the community version is free) and also have been modifying the Arduino code in the receiver to add functionality, such as storing the SSDV images locally.
It is still a work in progress but I have made a video showing the current state
Anyway as Cilla Black would say it's been a Lorra Lorra Laughs!

LoRa LoRa Laughs!
Due to the restrictions on airborne amateur radio operation in the UK High Altitude Balloon (HAB) enthusiasts have been forced to utilise licence exempt low power devices in novel ways to make radio trackers for their payloads. I have written plenty on this blog about my HAB tracking, the UKHAS distributed listener network and my own flights.
Until recently the preferred method was to use RTTY transmissions, however the advent of the IoT (Internet Of Things) has seen manufacturers of radio modules develop devices to increase both the range and reliability of communication between 'connected' embedded devices.
One such development are LoRa devices, primarily for devices to connect to a global wide-area network LoRaWAN, more information can be found at the LoRa Alliance in addition there are some open hobbyist networks such as The Things Network using these devices.
Using chirp spread-spectrum modulation these LoRa devices are marketed as being capable of robust, interference and fade resistant communication over longer distances and higher data rates.
The UK HAB community has begun experimenting with these devices and one of their keen proponents is Dave Akerman (M0RPI). Dave has developed both payload software for the "Pi In The Sky" PITS tracker along with Anthony Stirk (M0UPU) and gateway software in collaboration with Robert Harrison M0RJX. The 'gateway' is the necessary receiver element to upload the data to the tracking system. (all software is on the PITS Github page)
Dave gave an informative presentation on LoRa at the UKHAS 2016 Conference which is now available online (starts around 3 minutes in)
I had intended to fly a LoRa transmitter on my 2015 Hamfest balloon but it stopped working at the eleventh hour and hadn't done anything else with LoRa till recently.
Spurred on by the conference presentation and the fact more and more flights are carrying LoRa I invested in one of the Raspberry Pi expansion boards sold by Uputronics and built up another prototype tracker with a working LoRa module.
I have done talks at various radio clubs and societies and demonstrated it working but hadn't actually received a 'real flight' as opportunities have been scarce due to the weather. However in the few weeks I have tracked a couple of flights receiving both telemetry and image data, getting a couple of complete images from the imaginatively named 'SPACE' flight.
Dave Akerman also flew a flight experimenting with multiple payloads using Time-division multiplexing (TDM). It had 10 small of "AVRLoRaNut" trackers (of Anthony M0UPU's design) all set to the same frequency (434.450MHz) and same transmission mode. The trackers took turns to transmit, with each one allocated a particular transmission slot in a 20-second cycle. The cycle was GPS-timed but, if any tracker lost GPS lock then it derived timing from the transmissions from the other trackers (the LoRa devices are also receivers) All 10 trackers were suspended from the same balloon. This was in preparation for the 'Operation Outward' re-enactment next year (Steve Randall gave a presentation on it in the above conference video starts 1 hour 16 mins in)
I successfully received telemetry despite the flight not being local and constantly heading away from me as can be seen in the screen shots.
Always a busy man Dave also flew a flight with an experimental camera setup. The SSDV images this time came from a Nikon compact camera, connected to the Raspberry Pi via USB, and using gphoto2 software to take and transfer images to the Pi where they were stored, resized and converted to SSDV format for transmission. These were large images with a high quality SSDV setting so lots of packets per image, approx 1400 per image in testing.
This flight was using a 868MHz LoRa device, rather than the usual 434MHz due to the IR2030 restriction on bandwidth and duty cycle. Dave was using his Turbo-X or Mode 4 setting which is as fast as LoRa will go within IR2030 bandwidth restrictions (approx 8 packets / 2k bytes per second)
I hastily ordered a 868MHz device and soldered it in the spare slot on my gateway and built a collinear for 868MHz similar to the one I built for ADB-S reception (see video here).
You can see it lashed up just below the dual-band collinear - not ideal mounting and it wasn't tested in anyway, built blind! The less than optimal setup at UHF, the insane data rate and the distance (>100miles) were going to make reception difficult, so I was pleased I did manage to receive telemetry and image packets.
Most of the current LoRa development in the HAB community has tended to be on the Raspberry Pi due to the use with SSDV and the easy availability of cameras and ready built kit. LoRa is of course available on the Arduino platform and I had purchased a couple of 'Dragino' shields (pictured below) with a LoRa device on.
Dave has done some work on a AVR tracker software and a simple Arduino 'Serial' LoRa receiver. The receiver connects to a host PC appearing as a serial port and by running some gateway software the receiver can be configured via the serial link and received data is sent back to the gateway to be uploaded to the Habitat tracking system and SSDV system - the software can be seen here during the 'Operation Outward' test flight.
This gateway software is written in Pascal using Delphi and is not as functional as the Raspberry Pi Gateway software. Dave has made the source code available but I am not au fait at all with Delphi however I installed the free development IDE and intended to get in and make modifications but it seems to require a non-free(?) library for the serial comms so ditched the idea.
Instead I have spent the last few days developing a C# .NET version using Microsoft Visual Studio (the community version is free) and also have been modifying the Arduino code in the receiver to add functionality, such as storing the SSDV images locally.
It is still a work in progress but I have made a video showing the current state
Anyway as Cilla Black would say it's been a Lorra Lorra Laughs!
Until recently the preferred method was to use RTTY transmissions, however the advent of the IoT (Internet Of Things) has seen manufacturers of radio modules develop devices to increase both the range and reliability of communication between 'connected' embedded devices.
One such development are LoRa devices, primarily for devices to connect to a global wide-area network LoRaWAN, more information can be found at the LoRa Alliance in addition there are some open hobbyist networks such as The Things Network using these devices.
Using chirp spread-spectrum modulation these LoRa devices are marketed as being capable of robust, interference and fade resistant communication over longer distances and higher data rates.
The UK HAB community has begun experimenting with these devices and one of their keen proponents is Dave Akerman (M0RPI). Dave has developed both payload software for the "Pi In The Sky" PITS tracker along with Anthony Stirk (M0UPU) and gateway software in collaboration with Robert Harrison M0RJX. The 'gateway' is the necessary receiver element to upload the data to the tracking system. (all software is on the PITS Github page)
Dave gave an informative presentation on LoRa at the UKHAS 2016 Conference which is now available online (starts around 3 minutes in)
I had intended to fly a LoRa transmitter on my 2015 Hamfest balloon but it stopped working at the eleventh hour and hadn't done anything else with LoRa till recently.
Spurred on by the conference presentation and the fact more and more flights are carrying LoRa I invested in one of the Raspberry Pi expansion boards sold by Uputronics and built up another prototype tracker with a working LoRa module.
I have done talks at various radio clubs and societies and demonstrated it working but hadn't actually received a 'real flight' as opportunities have been scarce due to the weather. However in the few weeks I have tracked a couple of flights receiving both telemetry and image data, getting a couple of complete images from the imaginatively named 'SPACE' flight.
Dave Akerman also flew a flight experimenting with multiple payloads using Time-division multiplexing (TDM). It had 10 small of "AVRLoRaNut" trackers (of Anthony M0UPU's design) all set to the same frequency (434.450MHz) and same transmission mode. The trackers took turns to transmit, with each one allocated a particular transmission slot in a 20-second cycle. The cycle was GPS-timed but, if any tracker lost GPS lock then it derived timing from the transmissions from the other trackers (the LoRa devices are also receivers) All 10 trackers were suspended from the same balloon. This was in preparation for the 'Operation Outward' re-enactment next year (Steve Randall gave a presentation on it in the above conference video starts 1 hour 16 mins in)
I successfully received telemetry despite the flight not being local and constantly heading away from me as can be seen in the screen shots.
Always a busy man Dave also flew a flight with an experimental camera setup. The SSDV images this time came from a Nikon compact camera, connected to the Raspberry Pi via USB, and using gphoto2 software to take and transfer images to the Pi where they were stored, resized and converted to SSDV format for transmission. These were large images with a high quality SSDV setting so lots of packets per image, approx 1400 per image in testing.
This flight was using a 868MHz LoRa device, rather than the usual 434MHz due to the IR2030 restriction on bandwidth and duty cycle. Dave was using his Turbo-X or Mode 4 setting which is as fast as LoRa will go within IR2030 bandwidth restrictions (approx 8 packets / 2k bytes per second)
I hastily ordered a 868MHz device and soldered it in the spare slot on my gateway and built a collinear for 868MHz similar to the one I built for ADB-S reception (see video here).
You can see it lashed up just below the dual-band collinear - not ideal mounting and it wasn't tested in anyway, built blind! The less than optimal setup at UHF, the insane data rate and the distance (>100miles) were going to make reception difficult, so I was pleased I did manage to receive telemetry and image packets.
Most of the current LoRa development in the HAB community has tended to be on the Raspberry Pi due to the use with SSDV and the easy availability of cameras and ready built kit. LoRa is of course available on the Arduino platform and I had purchased a couple of 'Dragino' shields (pictured below) with a LoRa device on.
Dave has done some work on a AVR tracker software and a simple Arduino 'Serial' LoRa receiver. The receiver connects to a host PC appearing as a serial port and by running some gateway software the receiver can be configured via the serial link and received data is sent back to the gateway to be uploaded to the Habitat tracking system and SSDV system - the software can be seen here during the 'Operation Outward' test flight.
This gateway software is written in Pascal using Delphi and is not as functional as the Raspberry Pi Gateway software. Dave has made the source code available but I am not au fait at all with Delphi however I installed the free development IDE and intended to get in and make modifications but it seems to require a non-free(?) library for the serial comms so ditched the idea.
Instead I have spent the last few days developing a C# .NET version using Microsoft Visual Studio (the community version is free) and also have been modifying the Arduino code in the receiver to add functionality, such as storing the SSDV images locally.
It is still a work in progress but I have made a video showing the current state
Anyway as Cilla Black would say it's been a Lorra Lorra Laughs!
Hamfest Balloon – Some analysis
I contacted some local and national newspapers about the flight but with little response. The Register IT news website did put an article on http://www.theregister.co.uk/2015/09/28/pigs_in_spaaaace
I checked out the telemetry statistics on http://habitat.habhub.org/stats/ and was impressed with the number of people who tracked (as can be seen in the pie chart below) I know that several interested parties have since visited the UKHAS wiki and have been asking questions on the IRC channel on how to do a flight and/or develop their own trackers. Naturally I have also been thinking about some possible future flights.
While the novelty of flying something into space, be it a toy pig or an egg is satisfying I would like to make any future flight serve some purpose, whether collecting more data or ideally doing some experiment with radio even if it within the constraints of the UK draconian regulations when operating in the air!
One set of data I did extract was the temperature profile during the flight. PINKY had two sensors, one internal to the Styrofoam box, the other external. PIGLET also had a temperature/pressure sensor but it was giving odd readings during the flight so have ignored that.
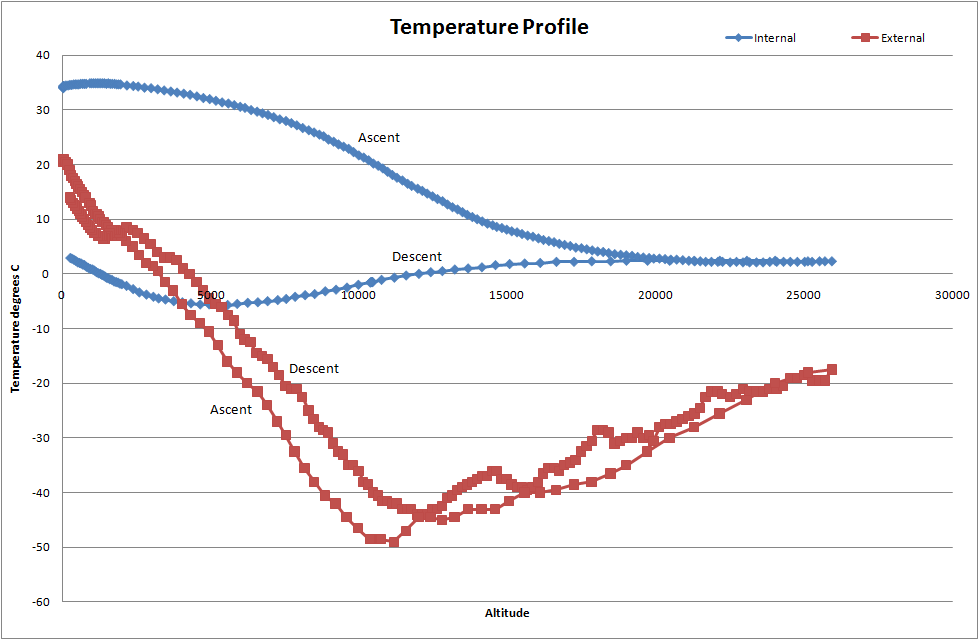
The graph shows internal/external temperature recorded by PINKY against altitude, there are two plots for each showing the ascent profile and the decent. The lowest temperature recorded by the external temperature was -49.5°C (-57.1°F) and the foam did a good job of insulating the internal electronics, though it drop below 0°C during the decent.
One thing I will do on the next flight (if it happens) is take a lot more photographs, using a 32GB memory card I could have held a lot more images. Also I will look at embedding the GPS coordinates (geotagging) into the image files.
I will also put on board a video camera, I did purchase a cheap dash cam type for £20 one off eBay for the Eggsplorer-1 but didn't use it because of sea-landing, I need to sort out powering it as the internal battery wouldn't last for the duration of the flight.
I have still to investigate the issues with the LoRa as to why it failed. This weekend Dave Akerman is flying three balloons in succession with LoRa tracker modules. They will be set up to work in a mesh, receiving and repeat each others telemetry. Sounds an interesting experiment, I will have to set my LoRa gateway back up and attempt to receive them.

Hamfest Balloon – Some analysis
I contacted some local and national newspapers about the flight but with little response. The Register IT news website did put an article on http://www.theregister.co.uk/2015/09/28/pigs_in_spaaaace
I checked out the telemetry statistics on http://habitat.habhub.org/stats/ and was impressed with the number of people who tracked (as can be seen in the pie chart below) I know that several interested parties have since visited the UKHAS wiki and have been asking questions on the IRC channel on how to do a flight and/or develop their own trackers. Naturally I have also been thinking about some possible future flights.
While the novelty of flying something into space, be it a toy pig or an egg is satisfying I would like to make any future flight serve some purpose, whether collecting more data or ideally doing some experiment with radio even if it within the constraints of the UK draconian regulations when operating in the air!
One set of data I did extract was the temperature profile during the flight. PINKY had two sensors, one internal to the Styrofoam box, the other external. PIGLET also had a temperature/pressure sensor but it was giving odd readings during the flight so have ignored that.
The graph shows internal/external temperature recorded by PINKY against altitude, there are two plots for each showing the ascent profile and the decent. The lowest temperature recorded by the external temperature was -49.5°C (-57.1°F) and the foam did a good job of insulating the internal electronics, though it drop below 0°C during the decent.
One thing I will do on the next flight (if it happens) is take a lot more photographs, using a 32GB memory card I could have held a lot more images. Also I will look at embedding the GPS coordinates (geotagging) into the image files.
I will also put on board a video camera, I did purchase a cheap dash cam type for £20 one off eBay for the Eggsplorer-1 but didn't use it because of sea-landing, I need to sort out powering it as the internal battery wouldn't last for the duration of the flight.
I have still to investigate the issues with the LoRa as to why it failed. This weekend Dave Akerman is flying three balloons in succession with LoRa tracker modules. They will be set up to work in a mesh, receiving and repeat each others telemetry. Sounds an interesting experiment, I will have to set my LoRa gateway back up and attempt to receive them.
Hamfest HAB Flight – Mission Debrief

The National Hamfest high altitude balloon flew on Saturday and Pinky Pig reached a maximum altitude of nearly 26km (25,927m / 96,873 feet) as pictured above.
The flight originally planned for Friday had to be postponed due to wind direction and restrictions but I had sort approval for both days and was able to fly on Saturday. The conditions were perfect on launch day, clear blue sky with little cloud and almost no wind. Flight prediction put it landing around 25km away.
Both payload trackers worked flawlessly, PINKY the high speed RTTY successfully sent SSDV as well as telemetry and the backup tracker PIGLET sent the slow speed RTTY telemetry. Trackers from all over the UK as well as France, Holland and Poland received data and uploaded data to the UKHAS website.

The received SSDV images can be seen at http://ssdv.habhub.org/PINKY
The flight path can be seen below
The flight can be seen visualised in Google Earth below and while the 26km altitude was impressive it was around 4km less than I'd planned.

The launch certainly created a great deal of interest at the Hamfest, on the Friday we setup the club tent for South Kesteven ARS with a tracking station and demonstrated the payloads to interested visitors. Stewart (M0SDM) used his Land Rover with a push up mast for a pair of collinear X-50s so we could receive and decode. The mast and the Land Rover generated just as much interest.


On the Saturday I was assisted by my brother David (M6GTD) and just before noon began filling the balloon watched by a large crowd, as can be seen on Dave's (M0TAZ) blog http://m0taz.co.uk/2015/09/national-hamfest-2015/
 |
| Picture by Dave M0TAZ |
Once filled to give the correct lift I sealed it off and checked everything was working then without a breath of wind slowly let the balloon rise, taking the weight of the payloads and once I was sure there were no aircraft flying nearby I let her go. The sky was clear and the balloon went up near vertically and could be seen for quite a long time as it ascended. Representatives of the RSGB and RadCom were in attendance to take photos and did a quick interview.
The tracking station was then full of people as the telemetry and pictures started to be received. It was great to see the huge interest in the balloon.
As the balloon started to near the planned maximum altitude I began to get ready to set off to recover it then suddenly I was told it had burst sooner than expected. I got a hurry up at which point the laptop and mobile connection decided to stop working! However I knew where to head off with my poor brother trying to sort it out as I drove.
Stewart telephoned and gave me directions of where the live prediction and tracking had put the landing spot. My wife also set off from home to come and assist. In the car we were receiving a signal but were struggling to decode and couldn't get on the internet to check the tracking.
I eventually pulled up near the landing zone, while trying to decode the weak signal another car pulled up with two radio amateurs who had been tracking the balloon. I was a little preoccupied and they eventually said they were off and wished us luck. I then realised we were the wrong side of the hill and turned around and drove up to the top and the signal strength increased.
Stewart had phoned to tell me to find the Viking way footpath, as we reached ground zero we saw the other amateurs car and they were setting off down the footpath! It was my flight I wanted to be the first to find it!
My wife then pulled up and was about to set off after them! Then I started getting successful decodes! With the new landing position in the GPS my wife raced off in hot pursuit as I sorted out the car and then followed her with my brother. It was a reasonable walk of around 800m and as we got near it became apparent the other team had been using the online tracker and had only got the last received position which had been sent from around 254m altitude. However the payload was still transmitting strongly and we were decoding it and it was reporting it was in fact at 115m altitude - they were therefore several hundred meters in the wrong direction.
Our accurate location gave us the edge and a quick hop up a bank into a stubble field and a 200m jog my brother spotted the parachute... we had found Pinky and Piglet and got there first!

I was surprised to find most of the balloon still attached, it hadn't so much burst as split in a single tear

The payloads had no damage, other than the antenna being bent by the landing

PIGLET had landed as planned and tested, I had put the battery pack at the top of the box the top heavy center of gravity causing it to roll on landing so the antenna would be upright. It was in a perfect orientation hence the strong signal.

The other chase team turned up and congratulated us then left... my apologies but I was in my own little happy place to be sociable. We then then had the obligatory team photograph before setting back to the Hamfest.

It has been an excellent experience and adventure. The pictures are better than I could have hoped for! Thanks to my understanding wife, my brother David and Stewart for setting up the antennas for the tracking station and manning it on his own while we went off to recover the payload.
Thanks to the organisers of the National Hamfest and Graham Boor (G8NWC) for asking me to do the flight and helping fund the venture and I hope it succeeded in publicising the event and the hobby.
I have now downloaded all the photographs from the onboard camera and they can been in my Flickr album at https://www.flickr.com/photos/nerdsville/sets/72157658732989849

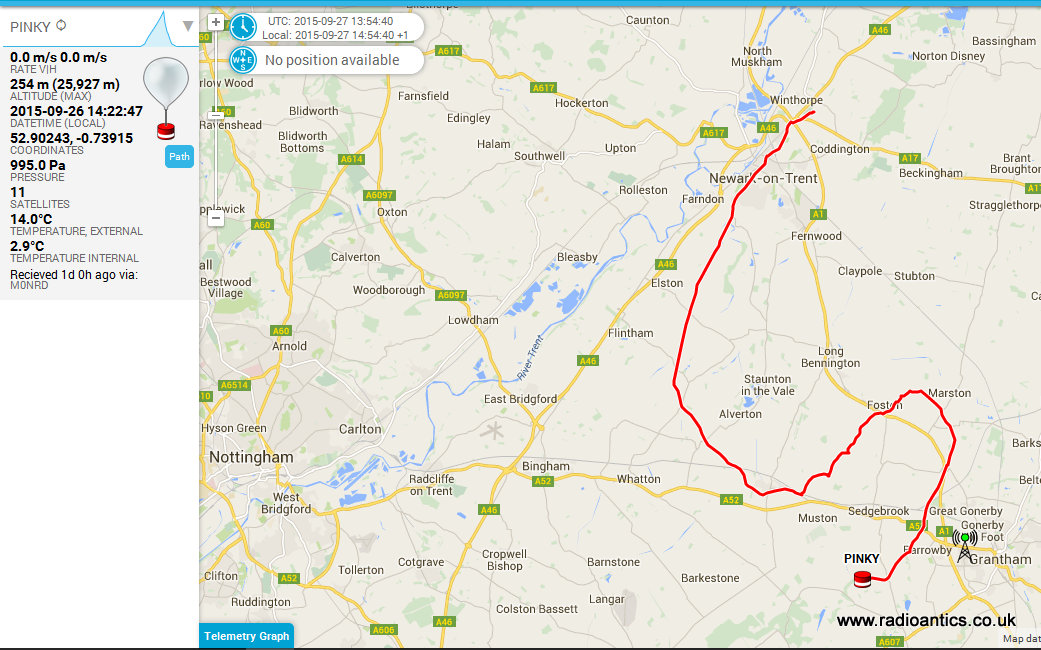
Updated - I realised I didn't put the actual landing position on this post, so here it is






Hamfest HAB Flight – Mission Debrief
The National Hamfest high altitude balloon flew on Saturday and Pinky Pig reached a maximum altitude of nearly 26km (25,927m / 96,873 feet) as pictured above.
The flight originally planned for Friday had to be postponed due to wind direction and restrictions but I had sort approval for both days and was able to fly on Saturday. The conditions were perfect on launch day, clear blue sky with little cloud and almost no wind. Flight prediction put it landing around 25km away.
Both payload trackers worked flawlessly, PINKY the high speed RTTY successfully sent SSDV as well as telemetry and the backup tracker PIGLET sent the slow speed RTTY telemetry. Trackers from all over the UK as well as France, Holland and Poland received data and uploaded data to the UKHAS website.
The received SSDV images can be seen at http://ssdv.habhub.org/PINKY
The flight path can be seen below
The flight can be seen visualised in Google Earth below and while the 26km altitude was impressive it was around 4km less than I'd planned.
The launch certainly created a great deal of interest at the Hamfest, on the Friday we setup the club tent for South Kesteven ARS with a tracking station and demonstrated the payloads to interested visitors. Stewart (M0SDM) used his Land Rover with a push up mast for a pair of collinear X-50s so we could receive and decode. The mast and the Land Rover generated just as much interest.
On the Saturday I was assisted by my brother David (M6GTD) and just before noon began filling the balloon watched by a large crowd, as can be seen on Dave's (M0TAZ) blog http://m0taz.co.uk/2015/09/national-hamfest-2015/
|
| Picture by Dave M0TAZ |
Once filled to give the correct lift I sealed it off and checked everything was working then without a breath of wind slowly let the balloon rise, taking the weight of the payloads and once I was sure there were no aircraft flying nearby I let her go. The sky was clear and the balloon went up near vertically and could be seen for quite a long time as it ascended. Representatives of the RSGB and RadCom were in attendance to take photos and did a quick interview.
The tracking station was then full of people as the telemetry and pictures started to be received. It was great to see the huge interest in the balloon.
As the balloon started to near the planned maximum altitude I began to get ready to set off to recover it then suddenly I was told it had burst sooner than expected. I got a hurry up at which point the laptop and mobile connection decided to stop working! However I knew where to head off with my poor brother trying to sort it out as I drove.
Stewart telephoned and gave me directions of where the live prediction and tracking had put the landing spot. My wife also set off from home to come and assist. In the car we were receiving a signal but were struggling to decode and couldn't get on the internet to check the tracking.
I eventually pulled up near the landing zone, while trying to decode the weak signal another car pulled up with two radio amateurs who had been tracking the balloon. I was a little preoccupied and they eventually said they were off and wished us luck. I then realised we were the wrong side of the hill and turned around and drove up to the top and the signal strength increased.
Stewart had phoned to tell me to find the Viking way footpath, as we reached ground zero we saw the other amateurs car and they were setting off down the footpath! It was my flight I wanted to be the first to find it!
My wife then pulled up and was about to set off after them! Then I started getting successful decodes! With the new landing position in the GPS my wife raced off in hot pursuit as I sorted out the car and then followed her with my brother. It was a reasonable walk of around 800m and as we got near it became apparent the other team had been using the online tracker and had only got the last received position which had been sent from around 254m altitude. However the payload was still transmitting strongly and we were decoding it and it was reporting it was in fact at 115m altitude - they were therefore several hundred meters in the wrong direction.
Our accurate location gave us the edge and a quick hop up a bank into a stubble field and a 200m jog my brother spotted the parachute... we had found Pinky and Piglet and got there first!
I was surprised to find most of the balloon still attached, it hadn't so much burst as split in a single tear
The payloads had no damage, other than the antenna being bent by the landing
PIGLET had landed as planned and tested, I had put the battery pack at the top of the box the top heavy center of gravity causing it to roll on landing so the antenna would be upright. It was in a perfect orientation hence the strong signal.
The other chase team turned up and congratulated us then left... my apologies but I was in my own little happy place to be sociable. We then then had the obligatory team photograph before setting back to the Hamfest.
It has been an excellent experience and adventure. The pictures are better than I could have hoped for! Thanks to my understanding wife, my brother David and Stewart for setting up the antennas for the tracking station and manning it on his own while we went off to recover the payload.
Thanks to the organisers of the National Hamfest and Graham Boor (G8NWC) for asking me to do the flight and helping fund the venture and I hope it succeeded in publicising the event and the hobby.
I have now downloaded all the photographs from the onboard camera and they can been in my Flickr album at https://www.flickr.com/photos/nerdsville/sets/72157658732989849
Updated - I realised I didn't put the actual landing position on this post, so here it is