 |
 Upcoming D-Day Special Event Stations
Upcoming D-Day Special Event Stations
Courtesy of the ARRL:
Several special event stations will be on the air to commemorate the 70th anniversary of D-Day — the Allied invasion of the Normandy Coast of France in World War II.
In France, TM70JUN will be on the air from June 6 — the actual anniversary date — until June 20. Modes will be SSB, CW, PSK, RTTY, and JT65 on HF and 6 meters. Special event station TM70BMC will operate from Mont Canisy June 5-8.
W9D will be active on SSB, CW, and AM on HF through 6 meters June 6-8 from the First Division War Museum in Winfield, Illinois.
VC3JUNO from Canada will be on the air from June 6 until July 31 to commemorate the 70th anniversary of D-Day; “Juno” was the code name for the beach where Canadian forces landed.
The Riverway Amateur Radio Society will sponsor special event station GB70DDL from June 1 until June 28 from the Sea Cadet headquarters in Stafford, England.
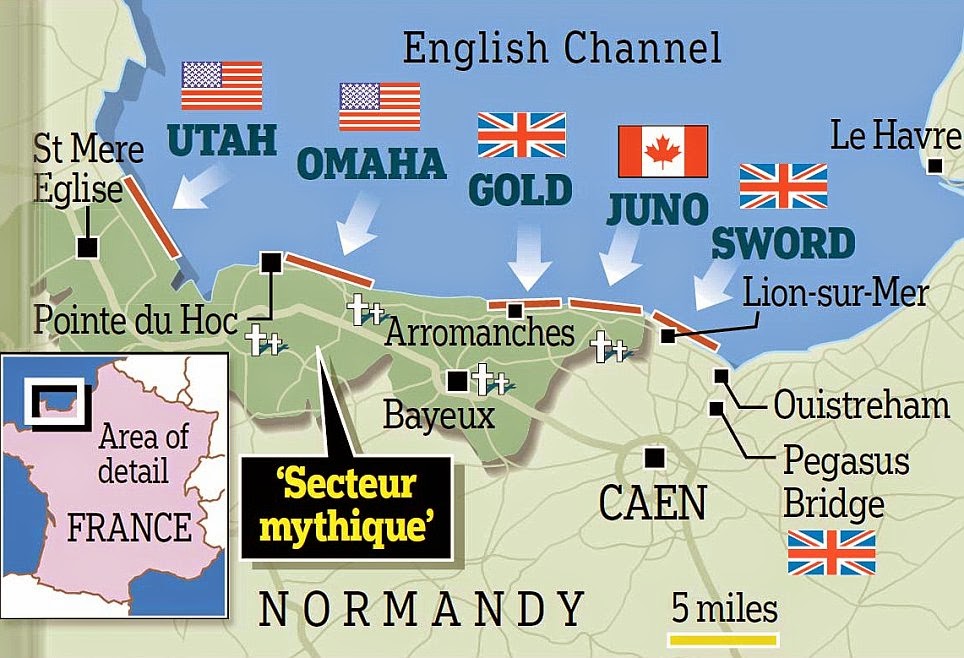
On June 6, 1944, 160,000 Allied troops landed along a 50-mile stretch of heavily-fortified French coastline to fight Nazi Germany on the Normandy beaches. The attack was a major turning point in the war. More than 5000 ships and 13,000 aircraft supported the invasion, in which more than 9000 Allied soldiers were killed or wounded.
72 de Larry W2LJ
QRP – When you care to send the very least!
Larry Makoski, W2LJ, is a regular contributor to AmateurRadio.com and writes from New Jersey, USA. Contact him at [email protected].
Preliminary QRPttF Results Posted
Paul NA5N posted the preliminary results of QRP to the Field 2014 to QRP-L last night. For the whole enchilada, you can go here: http://www.zianet.com/qrp/qrpttf/2014/ttf.htm

As you can see, W2LJ came firmly in the middle of the pack – a mere mosquito (Skeeter – Hi!) on the butt of the esteemed leaders. So, rule of thumb ……. if you ever hear me in a QRP Sprint or any other QRP contest – have no fear! I am a Giver Of Points only, and will most likely never threaten your lead. 😉
Oh, and many, many thanks to Paul Harden NA5N for hosting this really fun QRP event year after year and doing all the hard work that it takes to keep something like this running.
72 de Larry W2LJ
QRP – When you care to send the very least!
Larry Makoski, W2LJ, is a regular contributor to AmateurRadio.com and writes from New Jersey, USA. Contact him at [email protected].
Why Do I Like Operating QRP From Summits?
I enjoy QRP because it fits my minimalist philosophy of life. What is it that I really need to exist? Operating QRP is like catching a 10 lb. bass on 3 lb test line, it's like sleeping under a lean-to rather than a tent, using an EFHW instead of a beam, it's like David versus Goliath. In short, its a challenge to begin with and thrill when you succeed.
I like managing the gear. I'm always looking for better ways to manage a summit activation from logging to power supplies to antennas to radios. I 'm always looking for the lightest, most efficient approach. I like that no two activations are exactly alike. Deciding where to set-up, which tree has the best antenna support characteristics, where is best protection from the elements. The shack at home changes very little over time. It's almost boring.
I like the planning, topographic maps, coordinates, routes. I like the exercise, the incentive to stay fit so that I can enjoy what nature has to offer regardless of the altitude. I love the views. It makes me feel alive.
I like the points, the sense of achievement, although it's not always the achievement, it's the chase. The pursuit of the goal is what is motivating. I enjoy the chase.
I enjoy the comradarie of like minded indivduals and the SOTA program is very strong in that regard, it's full of people who love the outdoors, who enjoy QRP and like the challenges of both.
I just had to write it down.
Mike Crownover, AD5A, is a regular contributor to AmateurRadio.com and writes from Texas, USA. Contact him at [email protected].
Say a Prayer….Testing Tomorrow!
 |
| My Son Nick |
Big news! Tomorrow I will be testing for my Extra ticket…..but the bigger news is that my 16 year old son – Nick – will be testing for his Technician!
Burke Jones, NØHYD, is a regular contributor to AmateurRadio.com and writes from Kansas, USA. Contact him at [email protected].
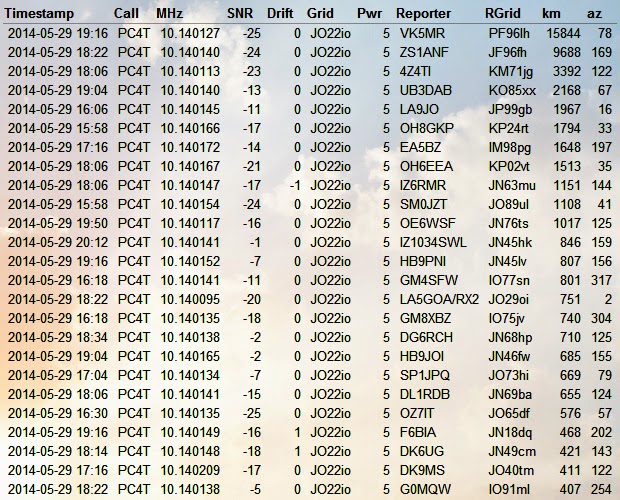
30 m noise

At 16 UTC the noise came in on 30 meters. I see often this kind of noise on 30 meters. Nevertheless, I did a good job with WSPR (5W and end fed antenna)
The XYL and my daughter are having fun in Dubai. Yesterday they went into the Dubai dessert. We keep contact with Facetime every night.

Paul Stam, PC4T, is a regular contributor to AmateurRadio.com and writes from the Netherlands. Contact him at [email protected].
Amateur Radio Newsline Report 1920 May 30 2014
- Good news for international cooperation an amateur radio satellite development
- Ukrainian ham radio society says that the Crimea should remain theirs for DXCC
- Special AM nets will mark the 70th anniversary of D-Day
- KickSat re-enters the Earths atmosphere without releasing its Sprite picosats
- A final wrap-up on Hamvention 2014 by AE5DW and K7JA
Temperature compensation for an Arduino ultrasonic distance sensor
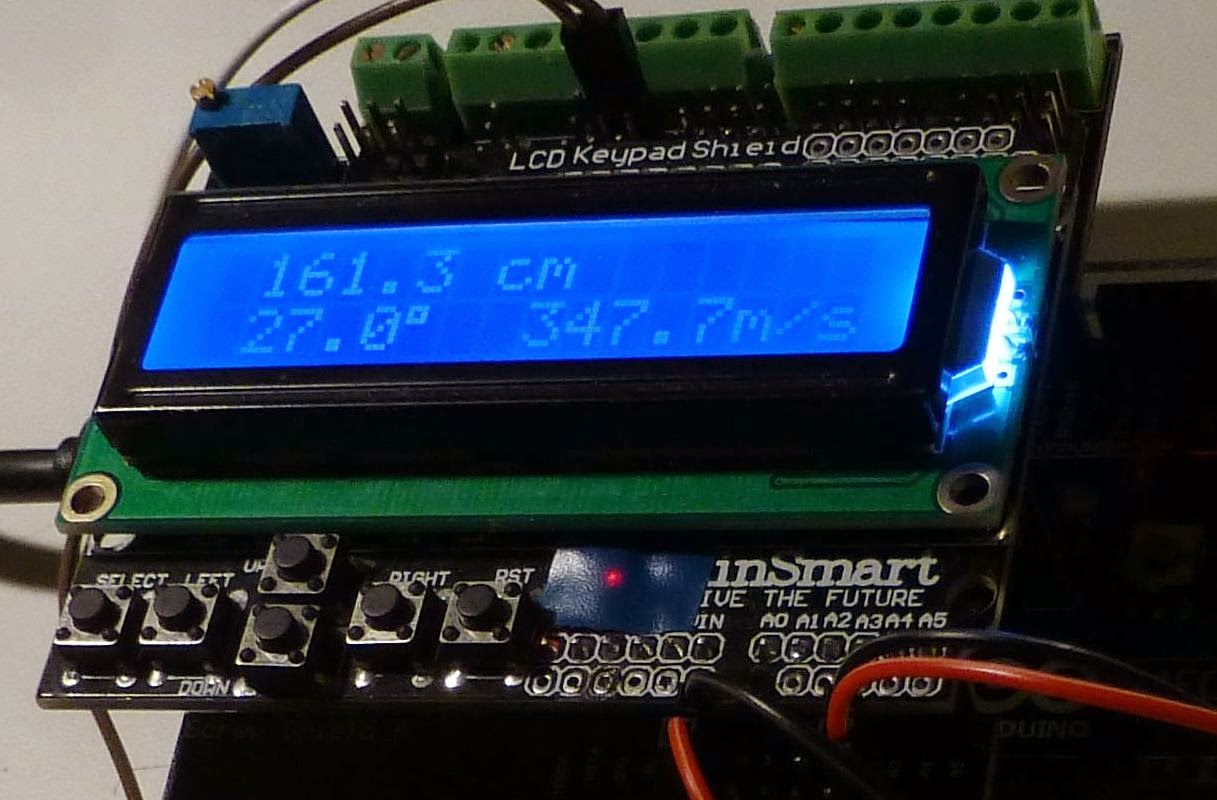 |
161.3 cm 27.0° 347.7 m/s |
Ultrasonic distance sensors can find the range out to 2-4 meters and are popular in e.g. robotics. Here I look at how the accuracy can be improved by compensating for the variation of speed of sound with temperature. It actually varies quite a lot in air and around 0 C it is:
c = 331.3 + 0.606 * T
where c is in m/s and T is in C. The formula is good to up to at least +/-30 C. There is also a dependence of humidity, but as it is so small it is neglected here.
The equation can be analyzed for sensitivity (a little bit of differentation, you know). The result is that a two-way range measurement creates an error of 1.8 mm/C/m. That means that with a 4 degree C error, the deviation will be 14.4 mm at a range of 2 meters. Not a lot, but more than the wavelength which is 9 mm at 40 kHz. Considering how easy it is to compensate for, then why not give it a try?

I have tested this with the inexpensive HC-SR04, but the compensation is really independent of the type of sensor. First let me analyze a typical example code for this sensor:
- For range in cm the code divides elapsed time in microseconds by 29. That corresponds to c=10,000/29=344.8 m/s. According to the equation above, this is the speed for a temperature of 22.3 C.
- For range in inches it divides elapsed time by 74. That corresponds to c=1,000,000/74 =13513.5 inches/sec =1126 feet/sec or 343.2 m/sec. This boils down to an assumed temperature of 19.6 C. That’s 2.7 degrees lower than the calculation for cm and means that the measurement in inches is lower than that in cm by 2.7*1.8 = 4.9 mm per meter of range.
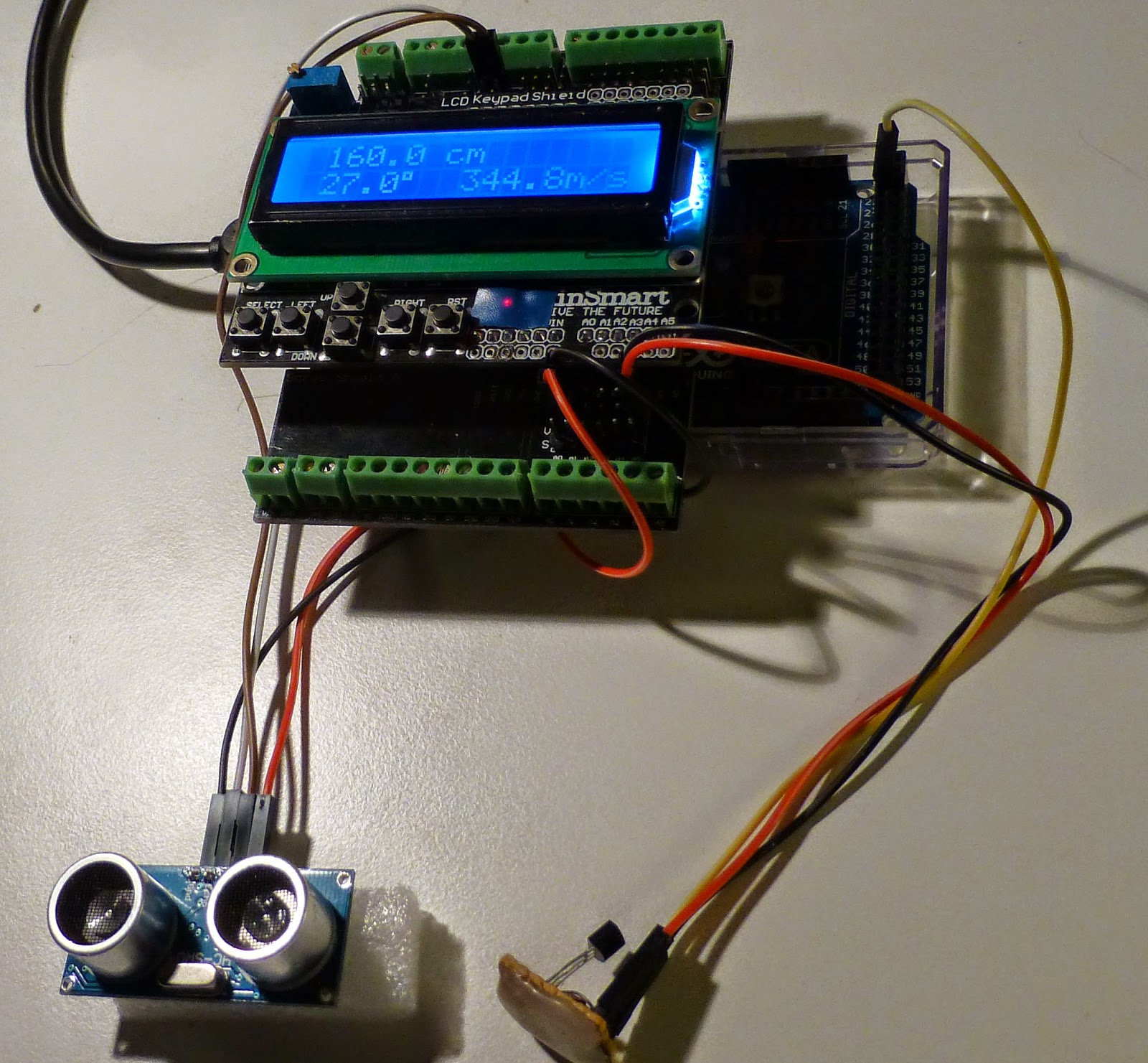 |
| Temperature is 27.0°, but the program doesn’t use that value and assumes instead its standard value of speed of sound of 344.8 m/s and finds 160.0 cm. |
I integrated an HC-SR04 program from Tautvidas Sipavičius with a code from the Arduino playground that uses the DS1820 1-wire temperature sensor (the last program on that page). In the process I had to convert the range estimation from integer to floating point arithmetic. This may give a speed penalty, but at least it runs fine on my Arduino Mega 2560.
The first image in this post shows that at a temperature of 27 C, the speed of sound is 347.7 m/s and the distance from my desk to the ceiling is found to be 161.3 cm. In the picture to the right, I have disabled the temperature compensation so the default velocity of 344.8 m/s is used instead and the estimated distance falls to 160.0 cm.
In the bottom picture, I have detached the 1-wire bus to the temperature sensor, so the program believes it is 0 C, and finds that the range drops to 154.5 cm.
 |
| 154.5 cm 0.0° 331.3 m/s |
Now, the HC-SR04 isn’t the most advanced of sensors. Other sensors may have a more accurate detection circuit that works more reliably and with better repeatability at longer ranges. I should also say that since I admitted a digit behind the decimal point in my code that wasn’t there in the original, my measurements wandered a bit from ping to ping also. In reality, I don’t think the HC-SR04 has much more accuracy than 1 cm. But it may have some potential for improvement as e.g shown here: “Making a better HC-SR04 Echo Locator“.
Combining a better detector with compensation for speed of sound variations with temperature should be what it takes to get the ultimate range sensor.
The Arduino sketch measures the range every 0.1 second and pauses for a second every 10 seconds to measure the temperature. The code is here (formatted with Hilite Me):
/* |
Sverre Holm, LA3ZA, is a regular contributor to AmateurRadio.com and writes from Norway. Contact him at [email protected].
 Ham Radio Deluxe |
 W5SWL Electronics |
 Ham Radio Prep |
 KB3IFH QSL Cards  Hip Ham Shirts  HamRadioAuctions HamRadioAuctions Reliance Antennas Reliance Antennas Enigma Shop Enigma Shop |  morseDX  Ni4L Antennas  R&L Electronics R&L Electronics antennas.us antennas.us QRV QRV |
- Matt W1MST, Managing Editor
